六轴串联垂直关节机械手Robot(位置控制)应用:
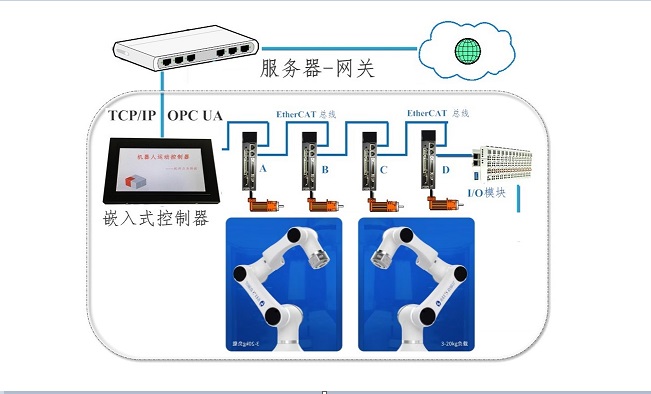
一、控制系统拓扑架构
1、应用开发平台:智能装备及工业机器人控制系统开发平台Codesys/TwinCat;
2、应用控制系统:2G/4核/Arm64运动控制器;2G/4核/PC运动控制器。
3、垂直关节六轴机械手:也被称六自由度机械手,是一种工业机器人,它具有六个活动自由关节;通常包括旋转(S轴)、下臂(L轴)、上臂(U轴)、手腕旋转(R轴)、手腕摆动(B轴)和手腕回转(T轴)
4、系统控制方式:Codesys—CNC/TwinCat-CNC
5、伺服驱动系统:Ethercat总线协议/CanOpen总线协议伺服驱动
二、机械构架及应用优势
1、每个轴(自由度)都需要一个伺服电机来驱动,通过减速机传动结构实现每个关节的转动角度;其中前3轴伺服实现位置控制、后3轴伺服实现姿态控制;。
2、通过这六个轴的组合运动,能够实现复杂的动作和操作,可以精确控制末端工具在活动空间内的位置和姿态;
3、它可以灵活地抓取、搬运、装配和焊接物体,完成各种工业生产任务;同时,还可以进行高精度的定位和运动控制,满足医疗手术、科学研究等领域的需求。
4、可根据3D视觉系统提供的信息,机器人手臂进行精确的抓取和放置操作。