首页
关于我们
企业简介
发展历程
企业文化
主要业务
3D视觉检测定位自动分拣应用
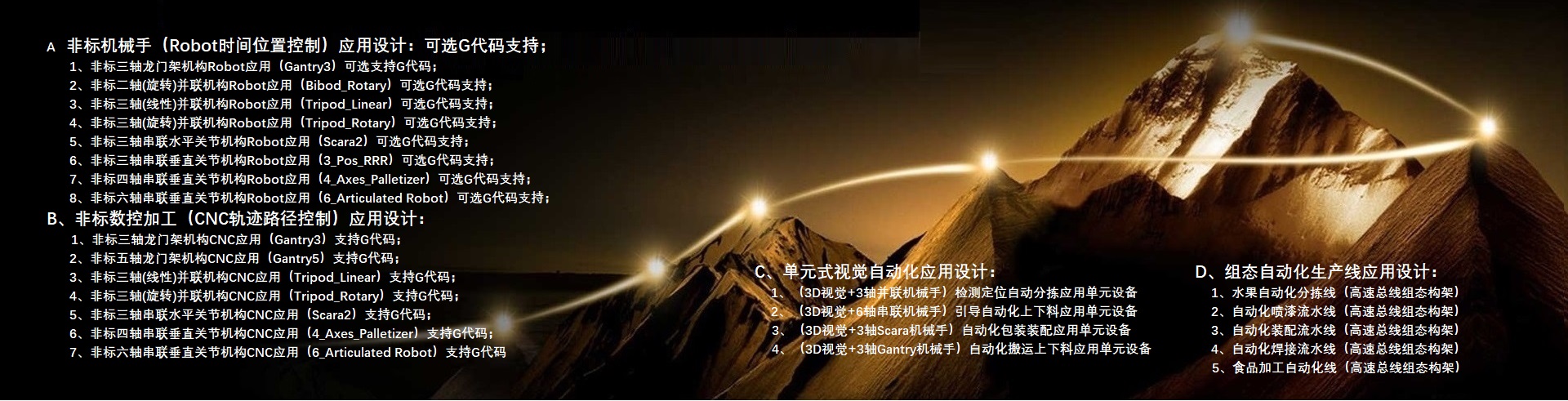
非标Robot(位置控制)应用设计
---
3D视觉引导自动化上下料应用
非标CNC((路径控制))应用设计
---
资讯中心
2D/3D视觉应用常识
非标Robot应用常识
非标CNC应用常识
技术服务
研发中心
在线咨询
售后服务
工程案例
联系我们
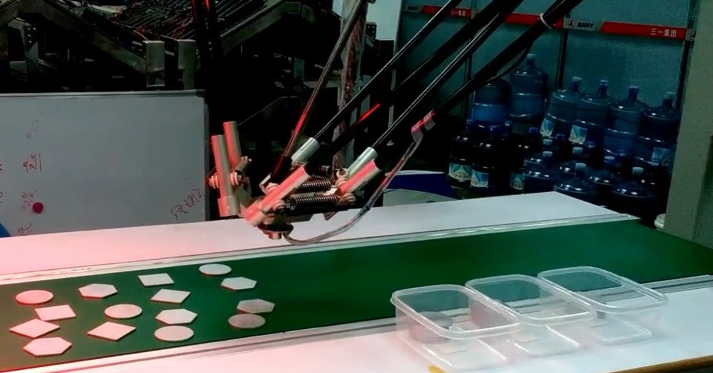
3D视觉检测定位自动化分拣应用
视觉检测定位自动分拣应用架构-1
三轴并联机械臂视觉分拣
1、系统应用开发平台:智能装备及工业机器人控制系统开发平台Codesys/TwinCat
2、视觉应用开发平台:Halcon/OpenCV
3、机械手构架方式:三轴并联高速机械手(前3轴实现位置控制、辅助轴实现方向控制)
4、机械手运动控制方式:Codesys—Robot/TwinCat-Robot
5、视觉应用抓拍相机:4K高清工业相机/1200万像素/Gige千兆网口/低畸变成像镜头;
6、系统应用附件:气动吸盘/气动夹具
查看视频详情
视觉检测定位自动分拣应用架构-2
水平四轴关节机械臂视觉分拣
1、系统应用开发平台:智能装备及工业机器人控制系统开发平台Codesys/TwinCat
2、视觉应用开发平台:Halcon/OpenCV
3、机械手构架方式:水平关节4轴串联机械手(前3轴实现位置控制、第4轴实现方向控制)
4、机械手运动控制方式:Codesys—Robot/TwinCat-Robot
5、视觉应用抓拍相机:4K高清工业相机/1200万像素/Gige千兆网口/低畸变成像镜头;
6、系统应用附件:气动吸盘/气动夹具
详情查看视频
视觉检测定位自动分拣应用架构-3
垂直6轴关节机械臂视觉分拣
1、系统应用开发平台:智能装备及工业机器人控制系统开发平台Codesys/TwinCat
2、视觉应用开发平台:Halcon/OpenCV
3、机械手构架方式:垂直关节6轴串联(前3轴实现位置控制、后3轴实现姿态控制)机械手
4、机械手运动控制方式:Codesys—Robot/TwinCat-Robot
5、视觉应用抓拍相机:4K高清工业相机/1200万像素/Gige千兆网口/低畸变成像镜头;
6、系统应用附件:气动吸盘/气动夹具
详情查看视频
视觉检测定位自动分拣应用架构-4
五轴桁架械臂视觉分拣
1、系统应用开发平台:智能装备及工业机器人控制系统开发平台Codesys/TwinCat
2、视觉应用开发平台:Halcon/OpenCV
3、机械手构架方式:三轴直角坐标系机械手+变位器(2轴)
4、机械手运动控制方式:Codesys—Robot/TwinCat-Robot
5、视觉应用抓拍相机:4K高清工业相机/1200万像素/Gige千兆网口/低畸变成像镜头;
6、系统应用附件:气动吸盘/气动夹具
详情查看视频
1
2
3
4
首页
|
关于我们
|
主要业务
|
资讯中心
|
技术服务
|
联系我们
18811179527
sales@xxxxx.com
北京西铁泰华科技有限公司 All rights reserved