四轴水平关节机械手Robot(位置控制)应用:
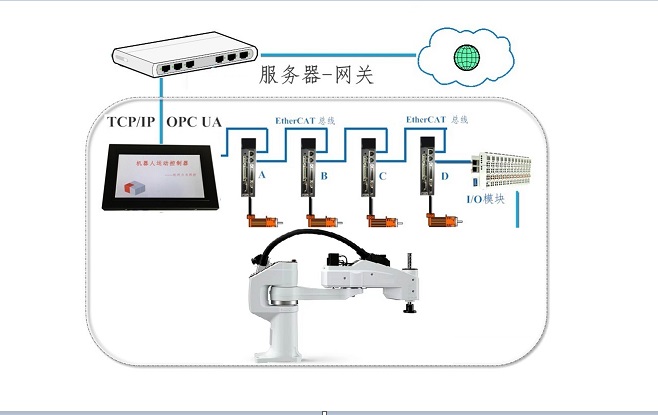
一、控制系统拓扑架构
1、应用开发平台:智能装备及工业机器人控制系统开发平台Codesys/TwinCat;
2、应用控制系统:2G/4核/Arm64运动控制器;2G/4核/PC运动控制器。
3、四轴水平关节机械手(SCARA ):SCARA ( Selective Compliance Assembly Robot Arm) 是一种基于圆柱型坐标系的工业机器人,有四个自由度;3个旋转副和1个移动副,
4、系统控制方式:Codesys—CNC/TwinCat-CNC
5、伺服驱动系统:Ethercat总线协议/CanOpen总线协议伺服驱动
二、机械构架及应用优势
1、因为它比较高的刚度、良好的顺从性、以及快速移动等特点,被广泛应用于装配和搬运等工程领域;
2、平面内定位精度主要由前2个旋转副来保证;其结构轻便、响应快,它最适用于平面定位,垂直方向进行装配的作业;
3、被广泛地应用于各种高速高精度装配作业中;其主要的性能指标是机器人末端的定位精度。
4、可根据3D视觉系统提供的信息,机器人手臂进行精确的抓取和放置操作。