三轴直角坐标机械手Robot(位置控制)应用:
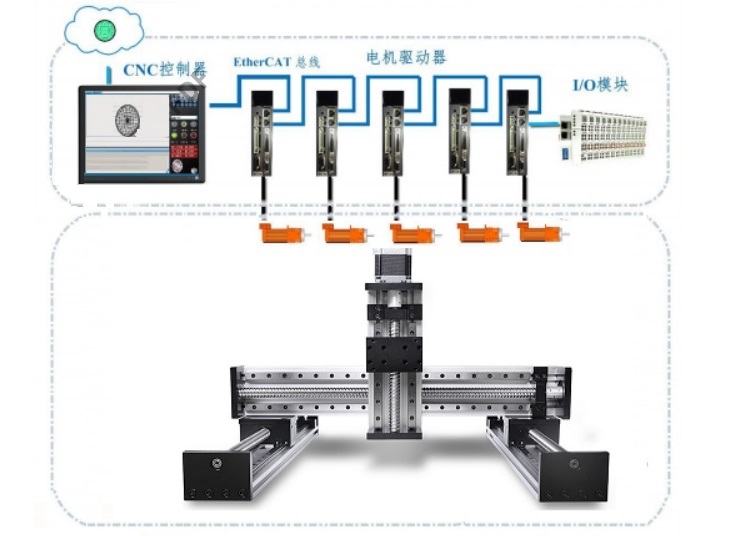
一、控制系统拓扑架构
1、应用开发平台:智能装备及工业机器人控制系统开发平台Codesys/TwinCat;
2、应用控制系统:2G/4核/Arm64运动控制器;2G/4核/PC运动控制器。
3、三轴直角坐标机械手:直角坐标机器人 (英文名:cartesian robot ),大型的直角坐标机器人也称桁架机器人或龙门式机器人(英文名:gantry robot)是能够实现自动控制的、可重复编程的、多自由度的、运动自由度成空间直角关系的、多用途的操作机构;
4、系统控制方式:Codesys—CNC/TwinCat-CNC
5、伺服驱动系统:Ethercat总线协议/CanOpen总线协议伺服驱动
二、机械构架及应用优势
1、其工作的行为方式主要是通过完成沿着X、Y、Z轴上的线性运动。针对不同的应用场合以及对精度、速度的要求可以选择不同的传动方式;
2、作为一种低成本、系统结构简单的自动化方案,直角坐标机器可以被应用于点胶、滴塑、喷涂、码垛、分拣、包装、焊接、金属加工、搬运、上下料、装配、印刷等常见的工业生产领域,在替代人工,提高生产效率,稳定产品质量等方面都具备显著的应用价值;
3、根据特定的工艺要求为末端工作头选择不同的夹持设备(夹具、爪手、安装架等),从而使之能满足于不同领域、不同工况的应用要求。其应用优势是灵活,多功能,因操作工具的不同功能也不同。
4、高可靠性、高速度、高精度;可用于恶劣的环境,可长期工作,便于操作维修;可根据3D视觉系统提供的信息,机器人手臂进行精确的抓取和放置操作。