三轴并联机械手Robot(位置控制)应用:
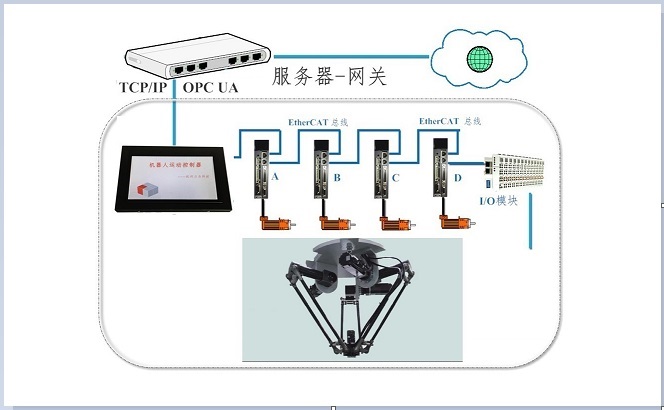
一、控制系统拓扑架构;
1、应用开发平台:智能装备及工业机器人控制系统开发平台Codesys/TwinCat;
2、应用控制系统:2G/4核/Arm64运动控制器;2G/4核/PC运动控制器。
3、三轴并联高速机械手:联机器人是一种并联机构,可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机
4、系统控制方式:Codesys—Robot/TwinCat-Robot
5、伺服驱动系统:Ethercat总线协议/CanOpen总线协议伺服驱动
二、机械构架及应用优势
1、并联机器人具有刚度高、速度快、柔性强、重量轻等优点,在食品、医药、电子等轻工业中应用最为广泛,在物料的搬运、包装、分拣等方面有着无可比拟的优势。
2、机器人手臂具备高度的灵活性和精度,能够适应不同形状和尺寸的工件,确保操作的准确性和稳定性。
3、可根据3D视觉系统提供的信息,机器人手臂进行精确的抓取和放置操作。